Project Overview
Victoria Catalán is part of our Sight Guide Team and is working on a navigation system for our pilot. Using a depth camera, Victoria analyses the environment in real-time to chart a path through the various challenges our pilot will face at the 2024 Cybathlon.
Preparing for Challenges
Victoria has set up a simulation of the "Sidewalk" challenge to test the depth camera and the navigation algorithm. This test environment, with a scooter and a water bottle as obstacles, mimics the conditions we expect to encounter at the Cybathlon.

Victoria's simulation setup, featuring a scooter and a water bottle as obstacles, to test the depth camera and navigation algorithm for the 'Sidewalk' challenge.
Algorithm Development
Victoria's work also involves refining the navigation algorithm. This process includes analyzing how the depth camera perceives the environment and how it processes this information to generate a navigation path around identified obstacles.
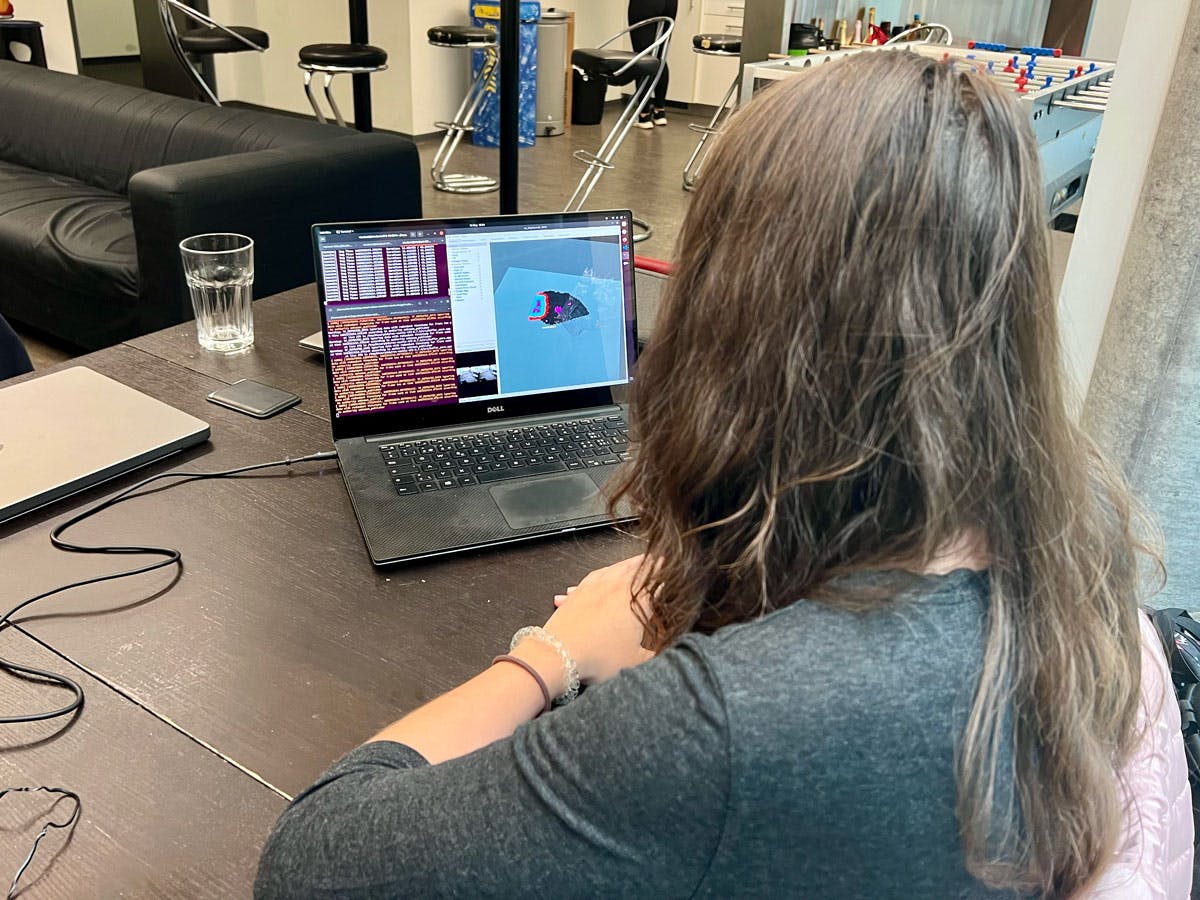
Victoria at her laptop, with the screen showing the depth camera's input and the navigation path being generated.
Safety Considerations
An essential aspect of the navigation system is the safety of the pilot. Victoria's system creates safe zones around identified obstacles. A screenshot from the depth camera's processed view demonstrates this feature, with different zones assisting in path planning.
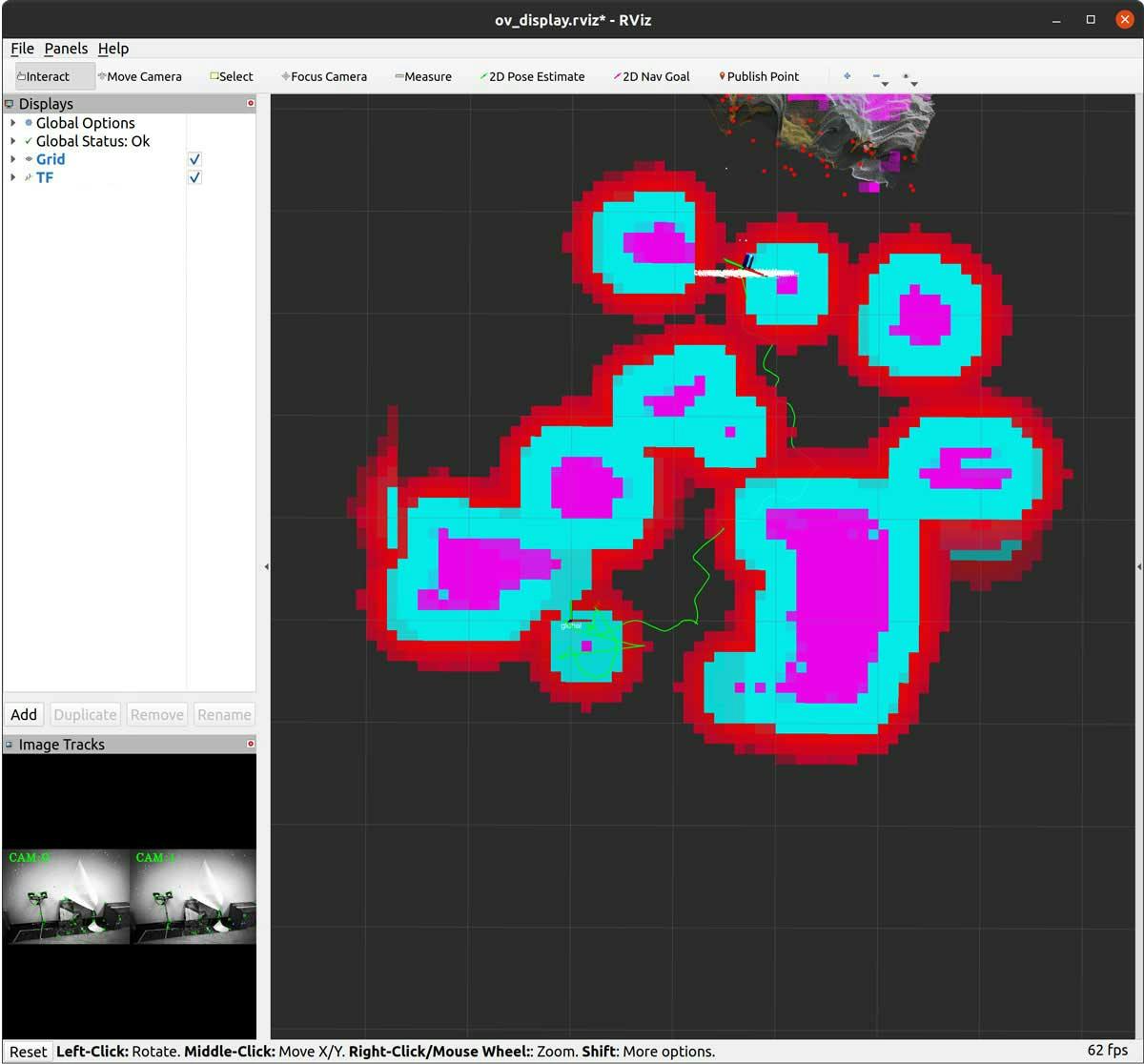
A screenshot of the depth camera's processed view, highlighting multiple obstacles (violet) and the safety zones (blue and red) created around them.
Progress and Future Work
Victoria's work, under Giovanni's supervision, is an important part of our preparations for the Vision Assistance Race at the Cybathlon 2024. There are also other student projects currently underway, each addressing different aspects of our preparation for the competition. Stay with us for more updates as we continue our preparations for Cybathlon 2024.
About Victoria Catalán

Victoria Catalán is currently a Master of Science student at ETH Zürich, specializing in Robotics, Systems, & Control. Her coursework includes Vision Algorithms for Mobile Robotics, Robot Dynamics, and Planning and Decision Making for Autonomous Robots. These studies have equipped her with a broad range of skills, including deep learning, motion planning, autonomous vehicles, and SLAM (Simultaneous Localization and Mapping).